November 22, 2017
SCI-Arc’s Robot House Aims to Change How Architects Draw and See
Robot House co-founder on how SCI-Arc’s six industrial robots are being used to rethink architects’ digital tools
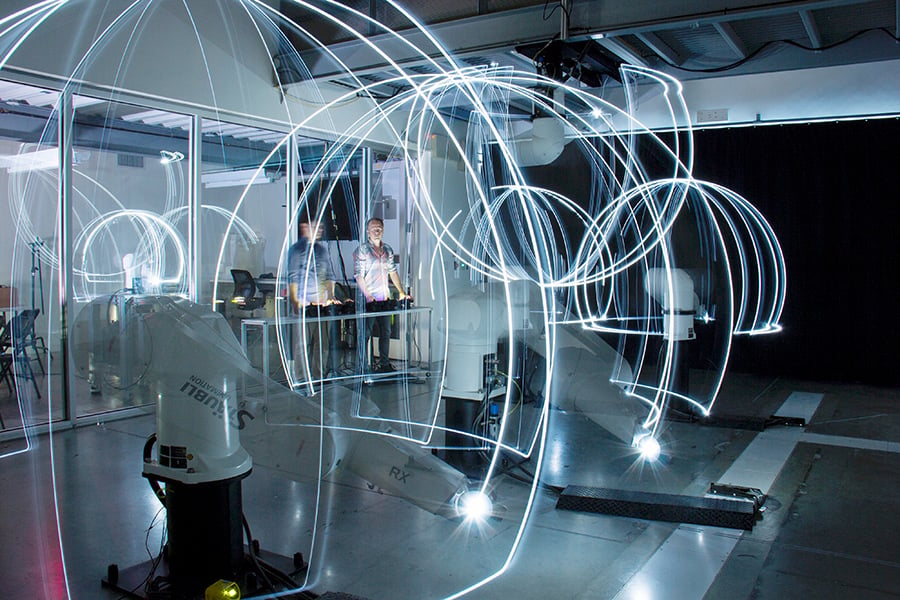
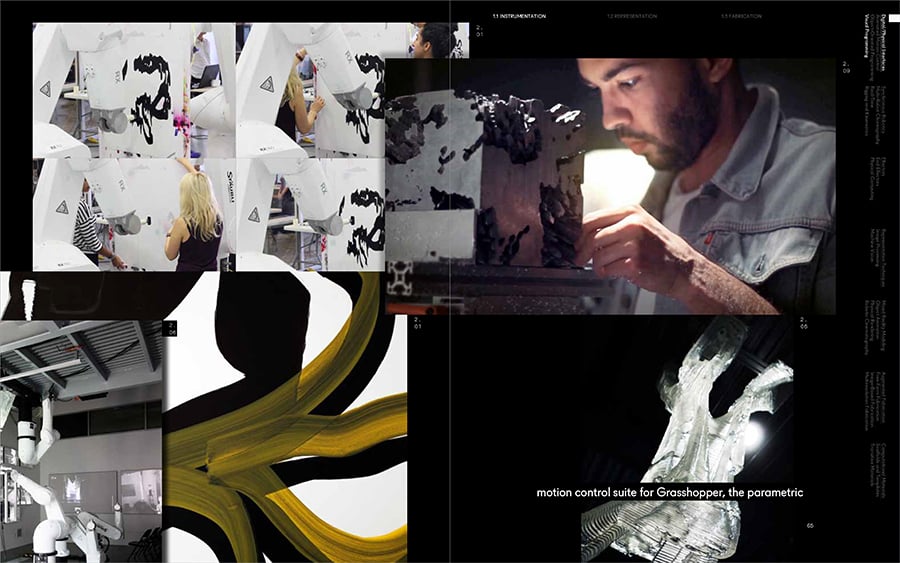
When we see robotic arms, they’re usually arrayed along an assembly line, conducting the same repetitious motions in a steady rhythm. In SCI-Arc’s Robot House, six industrial robots stand tightly clustered and they—for lack of a better term—dance together. Their choreographed movements are guided by custom-coded algorithms and produce captivating images that can be turned into drawings. However, that’s just the tip of the iceberg: the robots can electronically scan, twist, carve, 3D print, glue, mold, paint, and more. The end results are drawings and physical models that can appear like abstract art or architectural fantasy.
The program aims to fundamentally rethink how architects regard digital tools. Robot House co-founder and architect Peter Testa contrasts his work against how architects typically use digital tools: he argues that ubiquitous hyperrealistic renderings, algorithm-driven design, and 3D printing all reinforce a divide between the digital and the physical realm. Conversely, students and faculty working in the Robot House experiment with moving a design freely from physical materials (such as conventional drawings and physical models) to pixels, voxels, and other forms of digital information (via digital scanning, motion-capture filming, and the robots’ movements). “How we operate across the digital and physical, that’s unique to the work that we’re doing here,” says Testa. “We’re not trying to collapse the digital into the physical or reduce one to the other. In the workspaces we’ve developed, the digital and physical or the virtual and the actual run alongside each other in superposition.”
Testa co-founded the Robot House with Devyn Weiser, who together helm the Venice, California–based Testa & Weiser. Metropolis first interviewed the duo in 2015, some four years after they started the Robot House. Now, Testa has authored Robot House, a book that showcases various architecture studios that have used the robots. Metropolis spoke to Testa about the Robot House’s progress and what’s next for the high-tech workshop.
When we last spoke in 2015, you said the robot floats between being a design studio and a workshop. When using the Robot House, is there a conventional studio brief? Or is this more akin to experimentation?
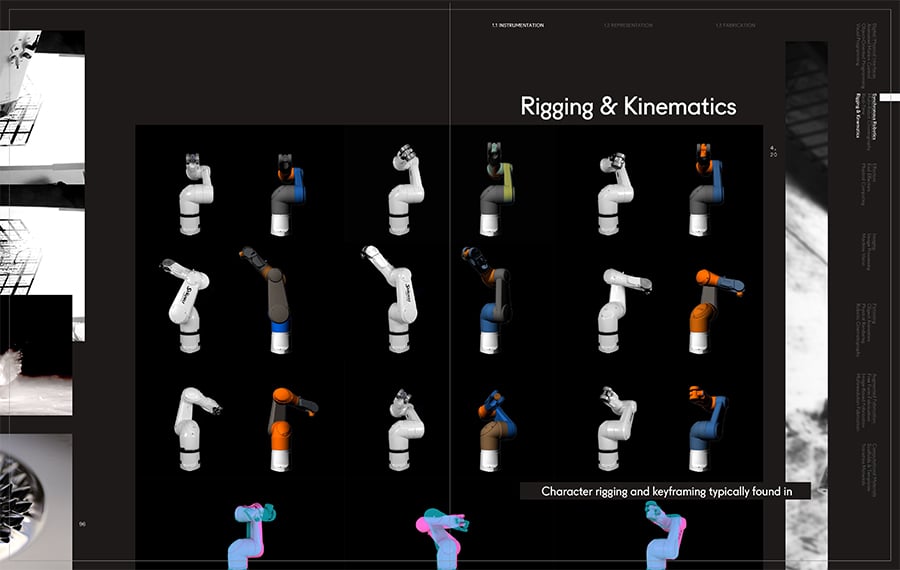
It’s evolved over time. In the first few years, the studios were quite experimental. The brief was focused on motion control and explorations of movement and motion in architecture. At the beginning, the tools that came with the robots were really not appropriate for use as a design platform for architecture students. We had to develop our own motion control interface with the focus on initially Maya and then Rhino Grasshopper. So, in a sense, the studio actually operated out of the robot house directly.
More recently, I wouldn’t say the studios are conventional, but they’re still quite speculative. They’re working more directly on architectural problems, using the lab more as a visualization and imaging toolset, at least in my case. The focus has shifted from motion control—which now is second nature— to imaging and new forms of modeling and generative representation.
The focus has always been on bridging digital and physical. Now it’s part of a larger interest in digitization, scanning, and reconstruction in parallel with more conventional 3D modeling and prototyping.
So movement and choreography were essential to how the robots took an active role in the architectural process. Can you elaborate on that?
Greg Lynn, in the book’s foreword, writes Robot House is a fundamental study of coordinated robotic motion and its possibilities for architecture and design. And that, I think, summarizes on the high level this idea of coordinated motion and choreography as being one of those foundational principles of this project. That also has to do with our initial selection of smaller payload robots. We have six robots and they’re all placed very close together, which in a way engenders this idea of collaboration both between robots, but also between students and the robots. Which I think is quite unique and remains pretty much as it was initially conceived because there’re so many different combinations possible. You have three sizes of robots with different reaches and so forth.
In a factory, working with large-scale robots, students can’t get within that space of operation, of motion. Whereas here, they’re able really get inside the space of motion and supports a very spatial kind of understanding about the motion. You can start to speculate on ways in which you can form new kinds of objects within that space and new kinds of spatial conditions.
Are there any particular projects that stand out as breakthroughs? Or have you really building one project off another?
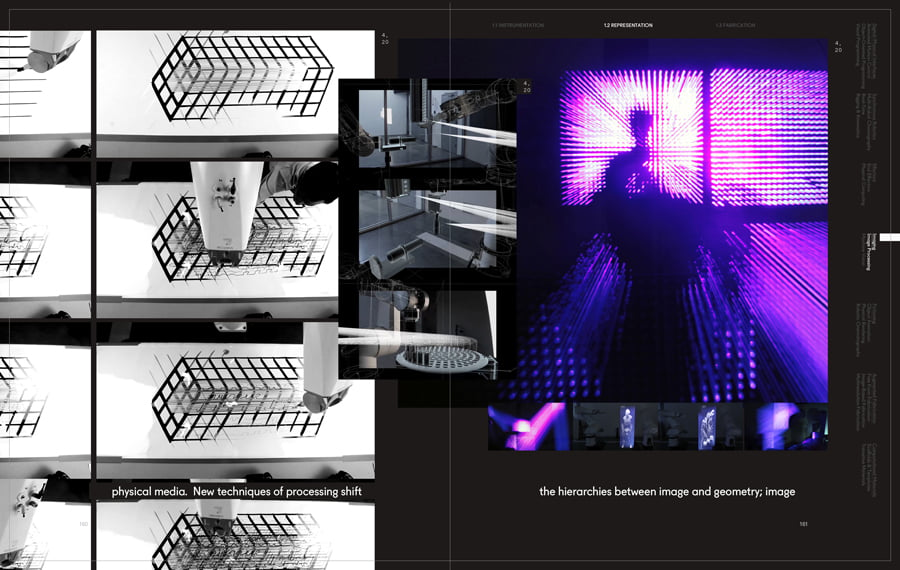
There were a few projects that were quite significant in terms of really establishing certain models that we tend to build off or refer to. Phantom Geometry established an image-based model of production and fabrication. It used streaming images to produce three-dimensional objects.
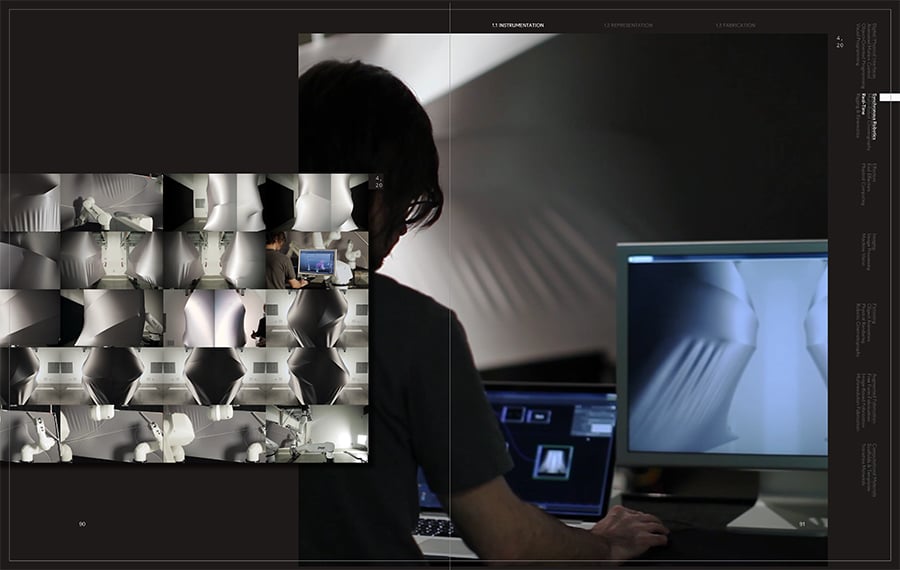
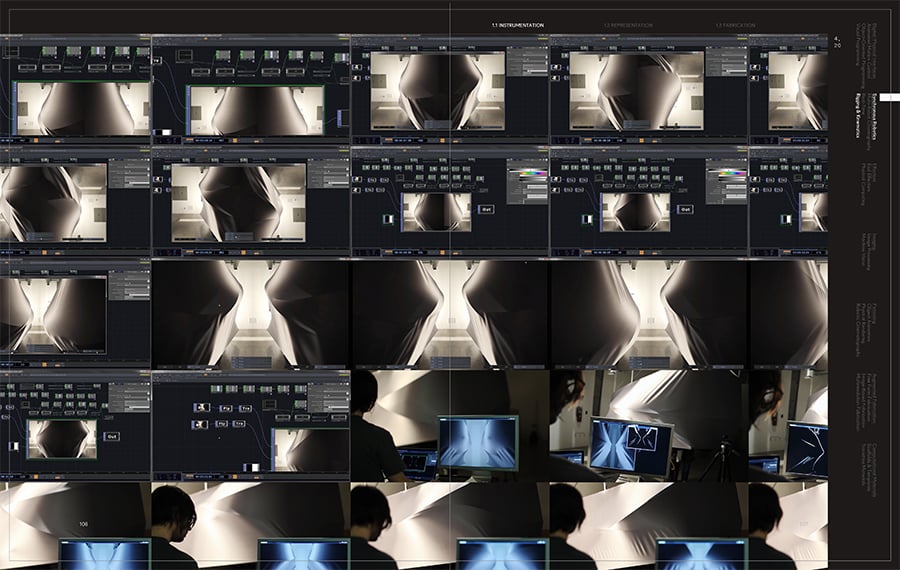
Another significant project was FIN.0; it offers a real-time physical animation and prototyping platform that supports the design and evaluation of 3D spline curve-driven surfaces. In FIN.0 robots are physically linked with rigid frames and flexible fiberglass splines that control a large fabric surface. FIN.0 has a feedback loop that allows designers to toggle back and forth between form-making and form-finding approaches in real-time.
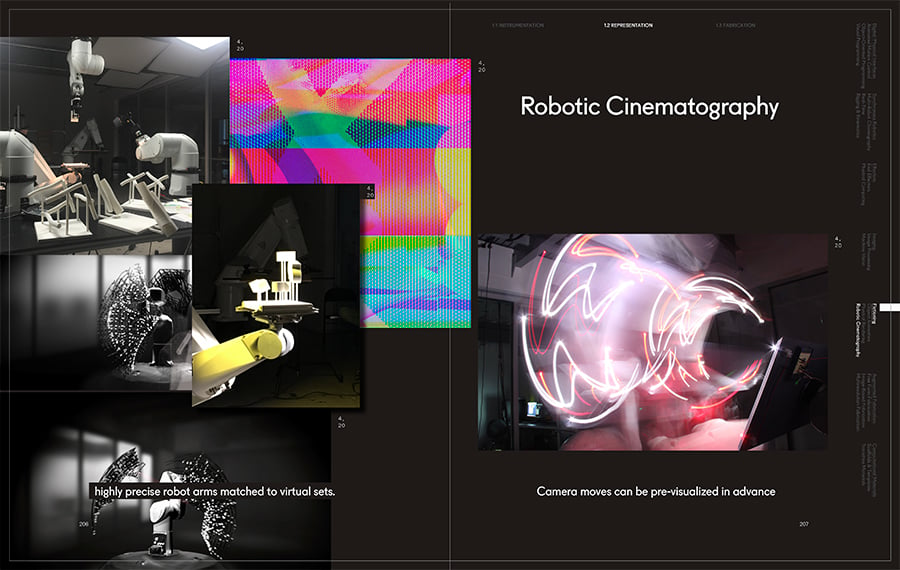
Similarly, SOL.MOTION investigates representation and manipulation of 3D objects within a virtual/physical or “phygital” motion based space. It uses time as a visible and malleable fourth coordinate. The project incorporates the techniques of slit scanning and bullet time to capture objects in multiple positions in space.
Object Animation, a project series led by Devyn Weiser, looks at robotic stop-motion animation, which is an area where we’re still keen to keep working. It’s a new way of combining digital and physical animation, which we’re starting to see more in films. It’s beginning to become a new trope in animation: combining robotic production to manipulate physical objects and capture motion sequences and a post-production to composite CG and stop motion.
Those were probably some of the more significant projects, although all of them matter equally in the end because they all build different kinds of techniques. These are open source projects, ultimately.

In the book, you allude to how architectural images are becoming more sophisticated and photo-realistic even as they also become ubiquitous, cheap, and disjointed from authorship. How do draw a connection between that and the Robot House’s work?
It’s the idea that there are other avenues. Speculating on representation is a fundamental disciplinary activity and I don’t think things just end with the toolset that’s now become conventional, as with rendering engines and so forth. It’s not a critique as much as exploring what could be the next level of development that addresses some of the shortcomings of the current digital toolsets and the aesthetics of rendering that doesn’t have a physical input.
The kinds of work we’re doing more recently really involve rapid digitization so that we can start with a physical model or start with an image and then work back and forth between scanning and rendering. We can work with voxels, pixels, and point clouds. There’s a wider range of informational models that produce different kinds of images, different kinds of effects.
I don’t think that we can really think outside the digital today. This is, in a way, an extension of the digital.
One of my questions was going to be, “How does this work trickle down to practice?” But the Robot House seems more about process and handling information.
Yeah, that’s more our focus. We see this as a conceptual installation rather than a production or fabrication tool even though that can be done on this platform. It’s a way of producing and thinking about form in other ways. The first mode of speculation in architecture is always seeing something differently. And that’s really what this, I think, affords. Now, whether that will translate using this platform to practice, I doubt it because it’s quite complex on a certain level. But I think the sensibility can definitely transfer into practice without necessarily the apparatus.
When you look at an image that’s been electronically processed, it can be hard to understand the technological processes that created it. Is that a problem or a benefit?
That’s a great question because part of what one is looking for today is making images that you can’t figure out how they were made. That’s a way of escaping the omnipresence of certain kinds of digital tools and tropes that are now conventionalized. It produces a certain kind of defamiliarization for the viewer so that you start looking at something maybe more closely, even though there’s a certain degree of legibility and familiarity to it.
What do you see as next on the horizon for the Robot House?
There’s now a number of faculty and courses working in the Robot House. Some are a little more fabrication focused but they’re also starting to look at things like artificial intelligence, neural networks, and different control and feedback models. There’s still a great deal of work to be done on the imaging side, which is where I’m mainly focused. I think we’re just at the beginning of this.
You may also enjoy “Design Earth’s Drawings Play With Iconic Designs While Pushing Architecture to New Scales.”






Recent Viewpoints

Viewpoints
3daysofdesign 2026: Vibe Over Spectacle